A hatch is very important to be able to adjust and work on the sails. They have to seal against the force of the sea and wind driven spray.
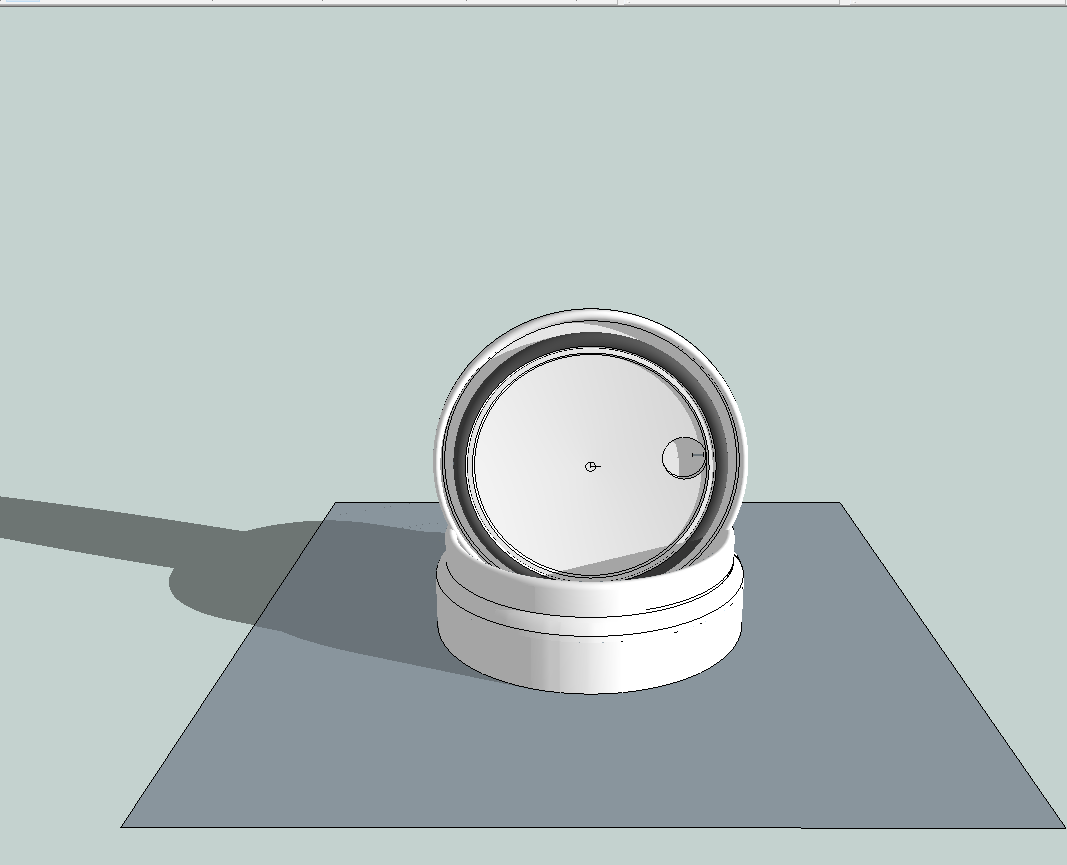
This illustration shows a circular hatchway in a notional deck plane. Above is the cover with a pneumatic seal, which can be inflated to 50 psi. or 3.45 bar. The seal is a bicycle tyre, large, strong, smooth without tread and a folding bead made from flexible Kevlar. The inflation valve will protrude above and below deck
The cover is sealed into the hatchway.
The cover cannot go through the hatchway because the diameter is greater. Then where to store the cover?, have it hinged?, or attach it with a rope and have it banging about in the wind and waves ? Not good.
Making the hatch system oval makes no difference to the tyre if it is the same effective circumference. I took the opportunity to add a window made from polycarbonate (Lexan ???) for interior light and being able to watch the sails and wind direction. It a double glazed system to reduce interior condensation.
The cover can now go through the hatch way and be stored below, safely. There will be handles attached to make the operation easier. Also a tether to stop it blowing away in a gust.
This second iteration of the sail has a symmetrical shape around central tensioning. The boom controls the sail, acts as an end plate to stop any thrust bleeding away. It also collects the skin and battens when reefed and completes the structure of the mast.. The whole assembly swivels on the central point. Again the mast has no significant effect on sail apart from holding it up.
Battens help to give shape to the sail material which has been cut and joined to give an aero-foil shape. The design of this batten comes directly from studying the nine section tail of a dragonfly. It is to be integrated inside the sail in pockets. The semi circular shapes are interlocking hinges, held together under compression. Between each section there are angled shoulders when all are closed on one side to form an E347 profile. On reflection I thought this made the sail too clumsy to build and may well suffer from too much wear to the pockets. Start again.
Here is a schematic of a batten on the boom to give me an idea of size of structure. This is a great break-through drawing because I saw the central tension should be applied not at the centre of the area (1/2 chord) of the sail but as close to the point of aero thrust generation. As the sail moves from one side (tack) to the other the central section barely moves. At this point I envisioned radiused tracks to maintain tension on the leading and tailing edges of the sail, (Leach and Luff) I had not got very far resolving the fixtures.
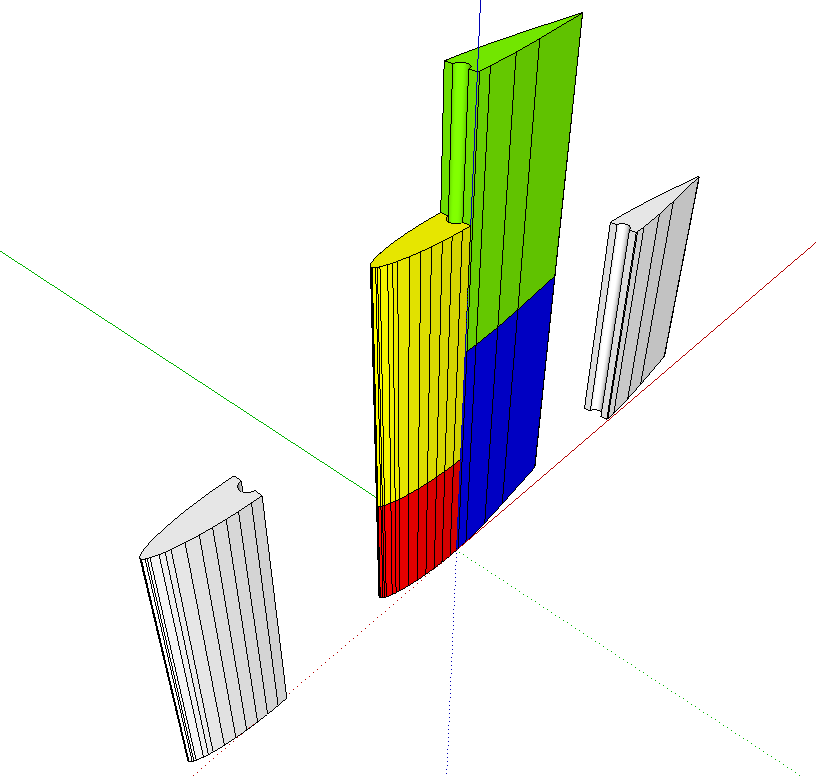
The breakthrough resulted in this wide, low aspect ratio, rig with a fore /aft mast. The boom is now a jointed trellis structure. Fairings can be added to reduce windage drag. The major advantage to this being the effort from the thrust of the sail can be accurately placed for the best characteristics of the hull shape. The red, central panel represents car seat belt webbing with a breaking point of 2500 kg. Handily it comes compatible with seat belt latches which are made from high grade stainless steal.
The big drawback is it’s ugly, clumsy, difficult to work around and ugly. Start again.
The batten was simplified from nine sections to seven. This image shows on the underside the shoulders have closed and the gaps on the top side show the angles that create a simplified E347 in the tensioned webbing. The whole sail surface is moulded together with the battens.
I decided to reduce the sail area, reduce the forces, make the battens all the same length and extend the tension system to the leading and trailing edges. The sail area is relatively low compared to racing boats, but by having two sets they can be balanced around the Centre of Lateral Resistance (CLR)
The boom is jointed and takes up the shape of the sail. The sail material is bonded to the webbing and batten sections.
To reef the sail the tension is released from below, through the mast, and sail lowered. The central latch is released and the one from above attached then either end are done, one at a time. At no time is the sail released from the boom and is always held by two connections. The tension is re-applied.
Tension is maintained in the moulding of the sail, especially to give the offset nature of the top webbings. The first is to the leading edge, the second to the centre, the third to the sail at the same angle (45 deg.) as the first, and the fourth to the trailing edge. Reducing tension very slightly from below, through the boom, on the centre web will increase the arc in the battens.
What follows is from the first of nine iterations is the development of a system to generate thrust from the wind, using first principle thinking.
Humankind discovered if you held a surface up, in the wind, it exerted a pull. In the case of kites, it is string or rope, with a boat it is called a mast, which is a big upright stick. Another stick was used to stretch the surface out. Different conditions across the world required different arrangements. Fishing, transport, cargo, warfare, discovery and competition all have their own different developments. All have the common drawback of the mast creating bad airflow around itself and an obstruction to easy sail handling. The weight of the mast and rigging and forces from the wind were and are usually led to the boat’s strongest member, the keel.
This is an initial sketch of ideas collected together to see what they look like. I choose one idea and give it more thought and work. I then stop, assess and analyse, and if a drawback out-ways the advantage then it is set aside, but not rejected. Later ideas and developments can redress the balance and make something feasible. The biggest difficulty, I find, is keeping sight of what I am trying to achieve, but not knowing how to get there, because no one has gone there before, that I know of. A simile would be, searching for a black cat in pitch-black room without knowing the size of the room nor what a cat is.
I wanted to hold a sail up into the wind but remove the stick. So I chose a catenary arch, one great advantage being it gets stronger the more it is loaded. Brunelleschi used it the structure of his cathedral in Florence and Gaudi in the Sagrada Familia in Barcelona. The best way to introduce loads into a tube is tangentially. The sail is held up centrally and rotates inside the arch. However this leads to the area being too small, so I added a second mast and sail.
3D printing enables very accurate manufacturing of aerofoil shapes, both straight and curved. The essential feature of a catenary arch is if the loads are kept within the limits of the structure it remains incredibly strong. Here is an illustration of the cross section with a width (chord) of 100 mm with a Teflon tube 8 mm with a 6 mm Internal Diameter (ID). 5 mm Dyneema rope with a breaking strain of 2500 kg runs through this and transmits tension through the sail back into the bottom of the mast, equally to both sides.
This is a screenshot of the slicing programme output of a vertically extruded printed core with internal bracing. Presently there are machines that can print to 2.1 metres high, although I have encountered vibration problems with smaller scale objects.
This represents exactly the same cross section but extruded horizontally and split vertically, enabling curved items to be printed.
These curved sections are then bonded together in a ‘’brickwork’’ fashion so no joins run across the complete width of the structure.
One incident in particular literally shaped this boat. Sven was interviewed in Madeira. He had to turn back from a single handed attempt to sail to New Zealand, round Cape Horn.
The boat he built was good, made with the best materials, but he realised it was not good enough to risk the worst conditions there are. Sven was very despondent, usually he is very positive. He did not have enough money to ship the boat back to Sweden, nor to scrap it, craneage, transport and disposal cost.
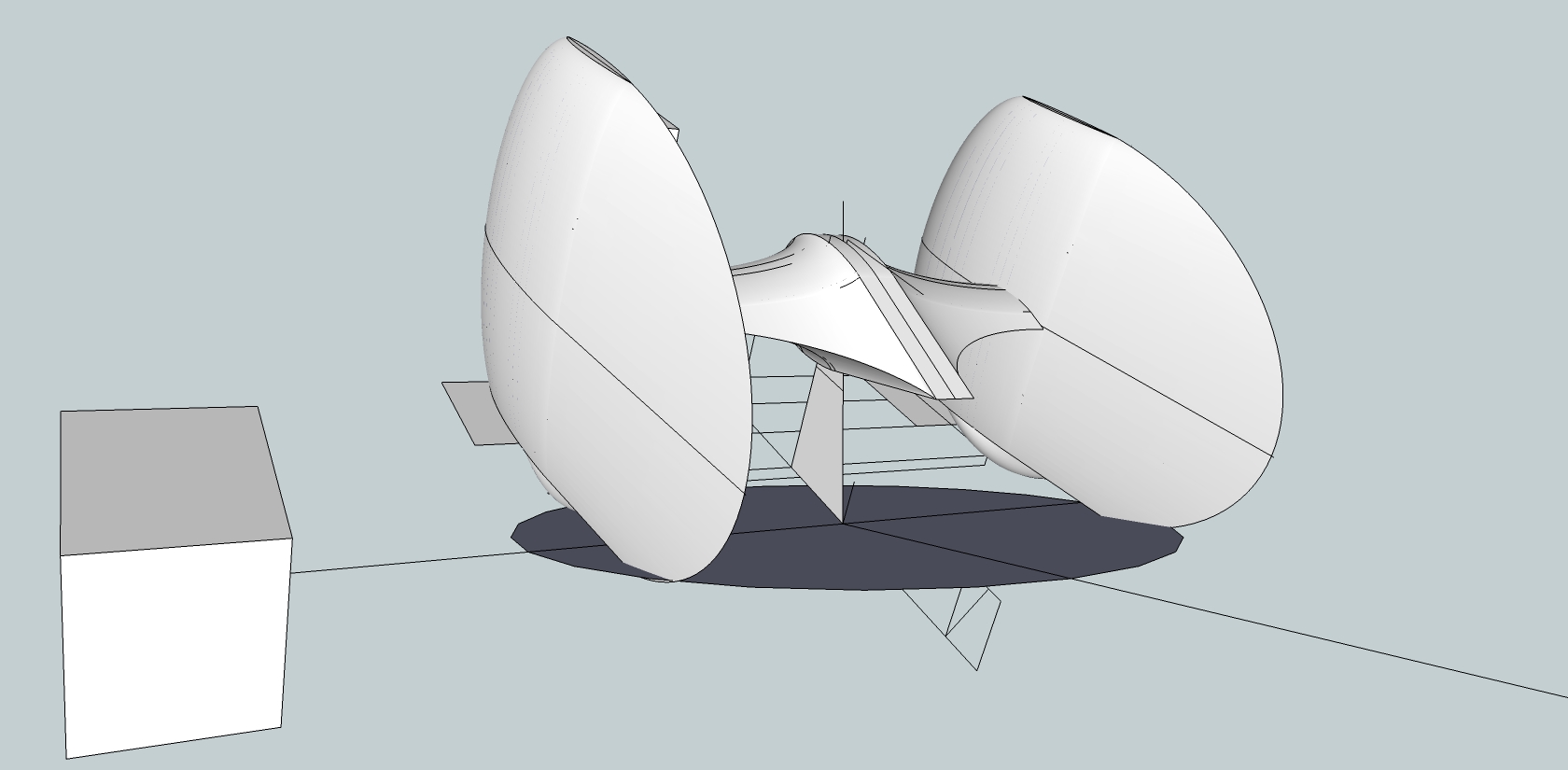
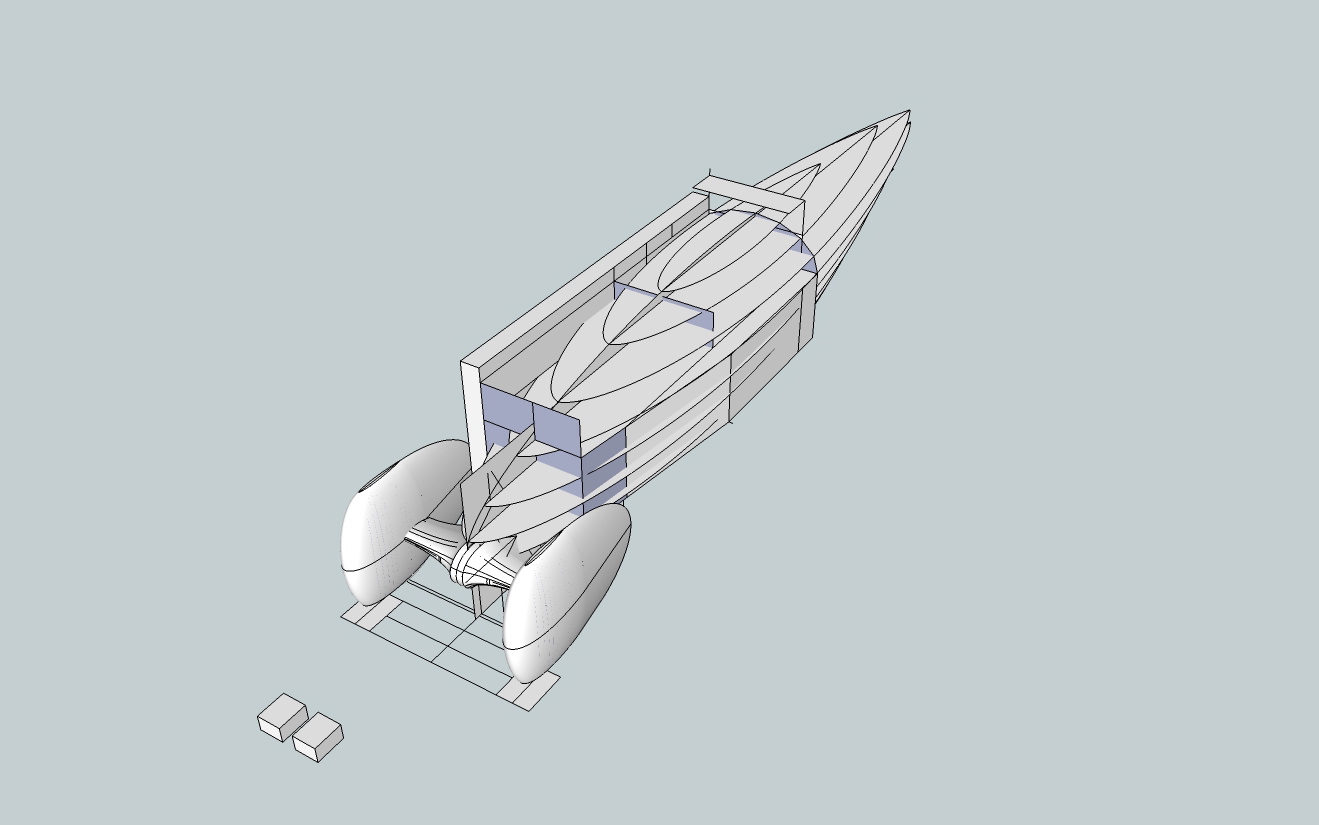
As good starting point, I thought, was to design everything to fit into a standard 20 ft. shipping container, the red box represents the internal dimensions.
The drawings are 3D CAD turned into illustrations, life size and show the core of the structure. No plugs, moulds, wastage and minimum sanding. All surfaces to be covered in high strength organic composites. The very minimum use of hydro-carbon based materials is the major target.
There are printers, at present, big enough to produce this design, so this is not sci-fi, nor photoshop fantasy.
This is not a racing boat.
As with the 1 metre pond yacht, the aero profile is Eppler 347. It is used for the hull sails, masts, keels and modified for the superstructure.
There are two small sails, so one person can manage the power and handle the reduction of area (reefing).
Aerodynamics are as important as hydrodynamics, so there are no drag inducing handrails, standing or running rigging nor lines. All controls for sail management and steering are internal.
The yellow ovals are hatches and are pneumatically sealed.
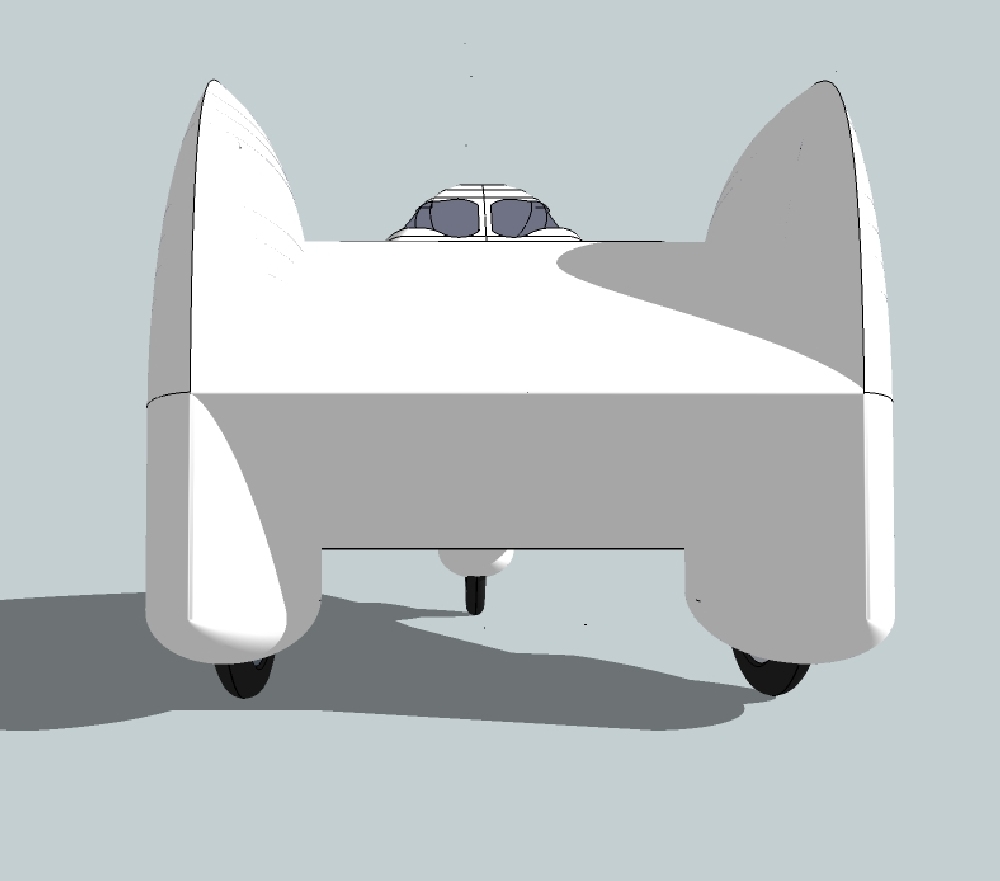
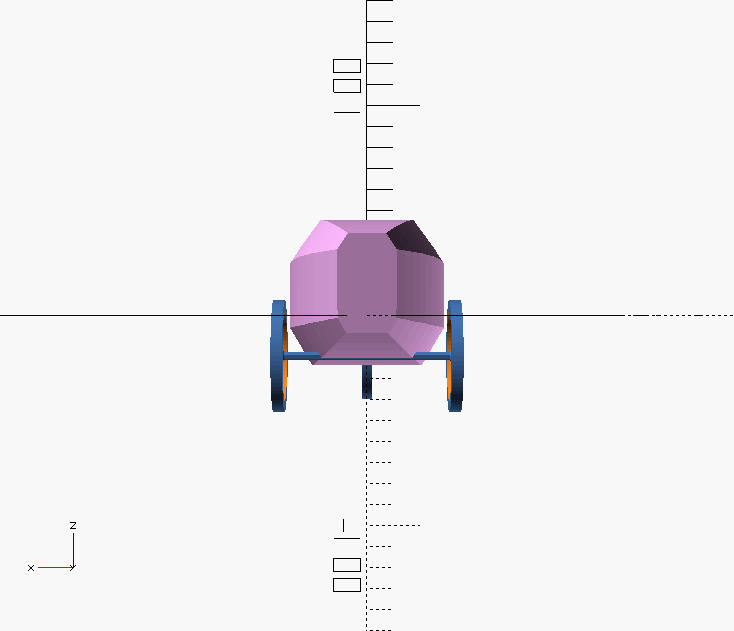
Here is the boat leaning at 38.7 degrees, there is no change to the under-water shape, so there will be no change in handling characteristics.
It is designed to exist in the water like a fish, not fight the element, but carefully divert the water with minimum disturbance. It should go through the waves not climb over them. Sealed against leakage rather than trying to cope with the after effects of deluge and soaking clothing and bedding.
Dried out on a sandy beach, waiting on the tide. The figure is included to give scale to what is really quite a small boat. There is enough clearance under the hull to land on a beach of small rocks.
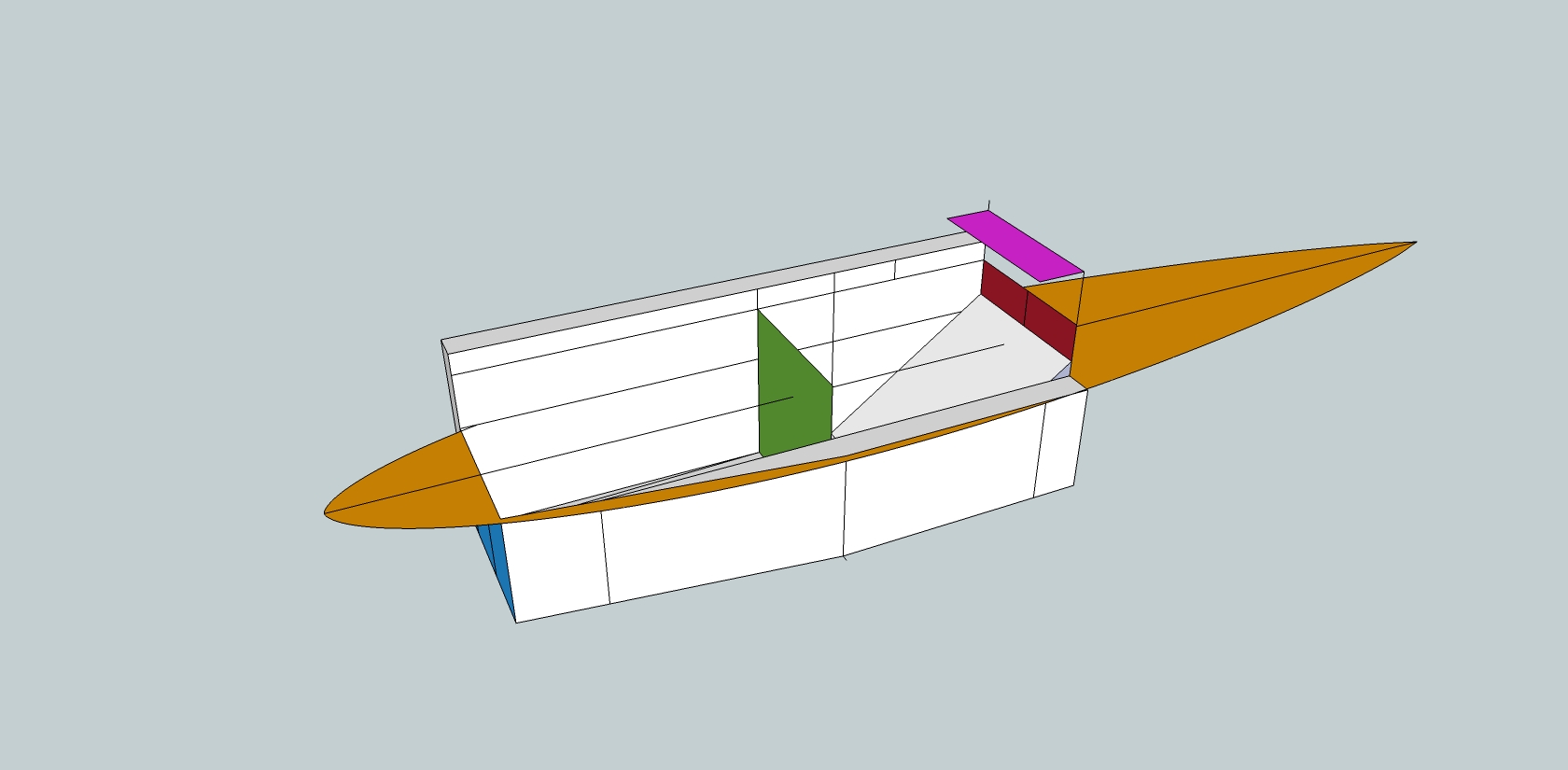
The keels act as a jig, in construction, to align the 1 metre sections for bonding
The tail is the full extent of the Eppler 347 to complete the flow around the hull with as little disturbance as possible.
This is the starting point of an idea that developed into a much larger project.
Aerodynamics and hydrodynamics are very similar, apart from water is about 1000 times more dense than air. I had a couple of ideas concerning the reduction of drag in a sailing boat. In order to test them I could build a pond yacht, to 1 metre class rules, and run side by side comparisons. In that way I could avoid all the work, expense and endless, endless sanding of building a full size boat.
Until recently boat designers have taken huge amounts of resources optimising surface areas in contact with water. Aerodynamics have been largely ignored in the mistaken belief that they do not come into play until much higher speeds are in play. In this design anything that could induce drag was discarded, simplifying the design.
The hull is Eppler 347 profile, as are the wing, fin and bulb, and is 1 metre long. The cross section is circular.
I chose an Eppler aero profile #347 for it’s low drag characteristics while also retaining enough ‘’body’’ to make a viable hull. This was rotated 360 degrees and left complete. There is no rudder system shown, possibly the keel foil can be used to steer.
As the screenshots show the hull can lean up to 80 degrees from upright with no change in hydrodynamic shape, characteristics or handling, being able to sail full on at 80 degrees lean. The bow is intended to move the water aside without creating a large bow wave and also go through a wave. Traditional bows finely cut the water but also ride up over a wave creating a rhythmic rocking-horse motion.
Yacht at 0 degrees.Yacht at 45 degrees.Yacht at 80 degrees. The under-water, hydrodynamic, shape remains exactly the same as 0 degrees.
The sail/wing/mast is a symmetrical E347 divided into leading edge mid-section and tail-section and hinged. The controls run up through the midsection and apply torque at the base and half way up, to orient the sections into a power generating aero foil. There are no standing rigging or lines, therefore no drag.
The nose and tail section are rotated at 7 1/2 degreesThis is a later iteration showing the hinge section, with spacing for printed thin wall skins. The main central support is reinforced carbon fibre tubing
The gaps between each section can be sealed with Teflon strip, edge-on. This may stop, or reduce, pressure equalising from low to high.
The lower parallel section and upper, tapered, section of the wing.
The major flaw to this wing system is being unable to reduce the effective sail area without becoming overly complicated and heavy.
I thought it best to build a prototype to test the steering geometry, as wobbles have been reported. This to be built with aluminium section and composite rear triangle.
This is the geometry involved. The idea of the tilt axle is from Vi Vuong, aka Futon Express, from the USA.
The rear axle uses a bottom bracket system, 100 mm cranks, 15 mm axles and the chain wheel represents a disc brake to stop the tilting.
Chassis with drive structure, longerons, windscreen frame and ‘’gills’’ for bending.
These are the intersections to define body parts and joints.
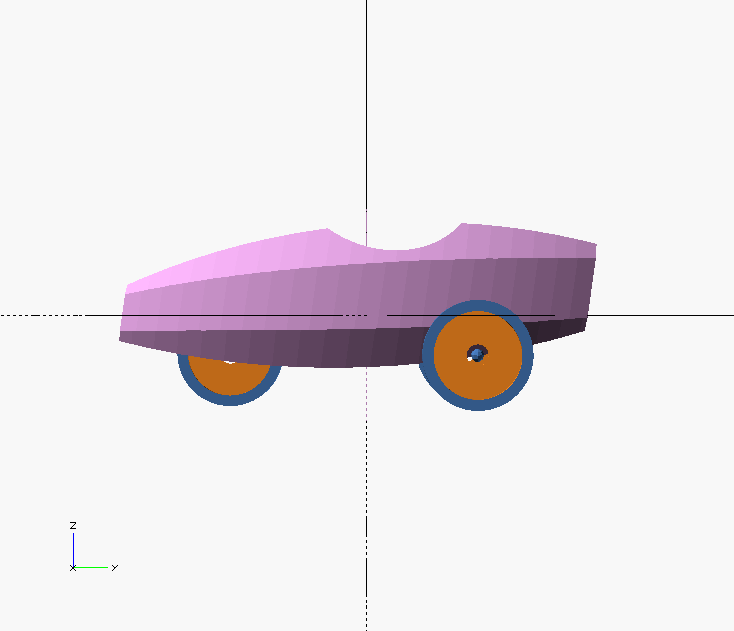
The final iteration with 26 inch wheels all round.
I looked first at the volume of the space taken up by rotating the feet on 175 mm cranks, and compared that to 140 mm cranks. Being so far forward it makes a difference in the volume of the nose and it is easier to push through air.
Also with this I wanted the following:-
A single simple form with no jointed surfaces, spats and head-farings. All joints on exterior surfaces of aircraft have fillets between them to reduce vortex drag.
The simplest drive line.
A faired recumbent bicycle that did not fall over when you try to get in or stop.
I wanted it to tilt into a curve to reduce the loads and stress on the wheel system and chassis so they can be lightly built.
!75 mm compared to 140 mm crank frontal areas
140 mm crank rotational volume.
The chassis bounded volume with 26 inch front wheel and 20
inch rear wheels. The chassis will be built from 3.4 mm Corex and 11.5 mm
honeycomb board hot-glue gunned with 12 mm conduit.
I have decided to update this site and describe the line of thought that led to the final design choices, for a velomobile trike.
Getting good airflow over breaks in the surface at the front, is near impossible, so I moved the steering to the rear wheel.
The next stage (body 10) was to try and simplify the form and integrate all the elements using negative pressure and try and do away with surface joints, at the front, as much a s possible.
The wheel spats are more integrated into the nose and the head faring smoothed into the body. I was happy, I had conquered all my demons.
After a short break I returned to this design and gave it a hard critical review. I had lost sight of the friction
in the drive line. With so little power available you cannot waste any on extra
bearings and changes of direction and weight
Even this simplified form had too many parts and too much wetted surface area.The cross sectional surface area
of a reclined human body looking over the knees remains the same. But what
about the area of the feet so far forward in a form, what is it, ??? and can it
be reduced, ???
In Part 1 of this write up I said the steering geometry is based on the invention of Jurgen Mages and his Python recumbents:-
http://en.openbike.org/wiki/Main_Page
There has been a great deal of discussion and argument about the best steering angles for any size wheel in any application of the bicycle, road racing, track, mountain bike, shopping bike. All have their subtle variations in angles and trail, all to do with where the tyre meets the ground and pivots. Then along comes Jurgen who places the steering head behind the wheel, does not attempt any of the known rules and it works.
What Jurgen discovered was that at a steering head angle of +/- 65 degrees as the steered wheel is turned the frame rises. The weight of the rider pushes back down stabilising the system.
I refer to Python Projects Survey http://www.python-lowracer.de/projects.html where I find the trail figure for a 20 inch wheel is +/- 140 mm and a steering pivot angle of 57.5 – 71 degrees. Now I know this is for two wheeled vehicles and I am designing a three wheeled vehicle but you have to start somewhere.
At this point in this project I have developed a simple idea. I have looked at wheel sizes, axles, airflow, body shape by profile stacking, rotation, and extrusion. I have enough toys to play with.
Now is the time to measure the movement in the body structure to give a reasonable turning radius. To do this I use the original Chassis Bounded Volume set up with 20 inch wheels. The file is smaller and takes less generating time. It also allows me to check I am not entering any clearance borders.
Importantly it will also show where a chassis will have to reach to tie it all in to a structure. I take the axle and wheels and add a rotation block with its axis at the point where the 65 degree steering angle meets the ground.
I then place a circle at the origin (the centre of the 3 axiis) and make it a Component. The axle, which is a separate Component is then placed with the trail point at the origin, and tilted forward. Both components are then made a Group. When the Group is tilted back so the axle is level the handling circle is now at 25 or 65 degrees. When the rotation tool is applied the handling circle the axle rotates at 65 degrees to the horizontal. I then position the axle to the correct point on the body and rotate the axle. Axle and body are now combined as a Group. When the Group is rotated to get the axle level the body leans away from the turning direction.
At this point, I reversed the direction of the steering pivot, everything else remains exactly the same. The body now leans into the turning direction. By the findings of Jurgen the geometry is self centering so to pull the body back upright release the steering.
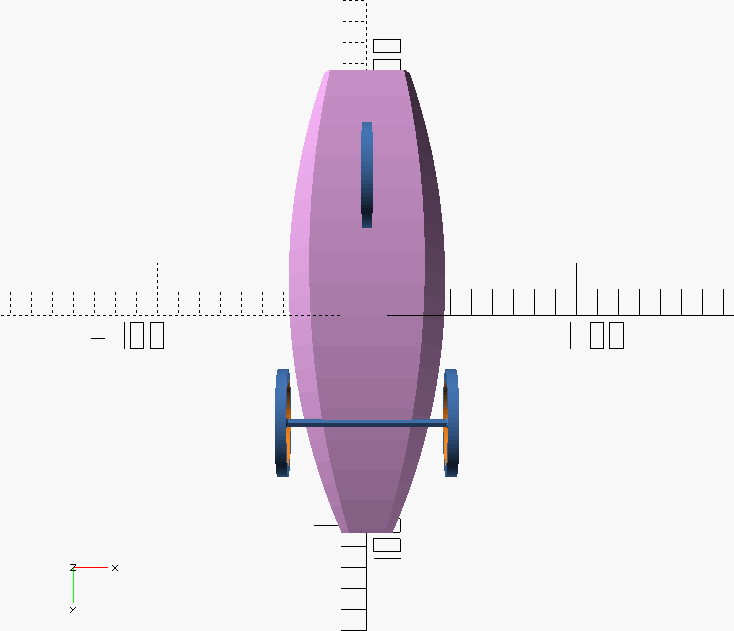
I repeated the process with the rendered body and the 26 inch wheels and straight axle to check for clearance, and this is what you get. I still have to carry on with the development of the one piece axle/nose and body bending design, but this is a good indication the geometry might work.
When I started out to design something I did not ‘see’ before, I did not expect this, but that is why you do it.
In various drawings you will see blocks and cubes dotted around. These are for handling, they allow you to manipulate the component accurately, Sketchup rotation tools have a hard time handling curved surfaces.
Now I have a quick-and-dirty knock up drawing. some parts are accurately placed but nothing is fixed or final.
The only restriction I have placed on this design is that the maximum width is 800 mm, to go through a door in my apartment.
The first thing I checked for was the sight line, it was way too long.
So I redesigned the body with a straight line nose profile from just below the eyes and clearing the front axle.
It was so ungainly I am not allowing it out in public. Maybe the theory is sound but it does not always produce pleasing results as I found.
Maybe there is work to be done improving visibility without scaring people.
So I went back to body 1.
I had a 20 inch BMX wheel lying around while i was drawing. The smaller diameter rims have a hard time with the condition of the road and cycle track around here. I drew 26 inch 559 wheels and spats.
The increase in surface wetted area and cross sectional area is offset by the decrease in rolling resistance and tyre availability.
The down side of the larger wheels means the air flow between the spats and nose is becoming more restricted and looks like it will generate higher air pressure and therefore drag.
I act on niggles. I am not very smart and it takes time for things to sink in. Then they start to niggle at me, then I have to do something about it. The problem was always there, it is just exaggerated with larger spats.
The thing I tried was to increase the size of the axle fairing and placed so the air travels up the profile increasing in pressure. However when it goes over the hump on both fairing and spats the pressure will be negative by the time it hits the nose which has effectively pushed back.
Body 3.1 is the same but with an enclosed head fairing and a larger rear wheel spat, but this will cause grounding problems.
Body 3.2 Is another variation on the head fairing.
Body 4 gH2Ost Rerun: is the beginning of thinking about the engineering of bending the body to steer the wheels.
I have lying about some 100 mm diameter Tumble Dryer hose, 25 mm compressed length stretches out to 120 mm, while retaining it’s circular form. I also have 80 mm hose.
I needed a semi circular cross section round about the trailing edge of the spats. At the same time I took the opportunity to split the body into two zones.
The upper section for the width of the arms and shoulders and the lower for the rib cage, hips and feet. I used E 817 for the upper profile, angling it in from the spats through clearance at the shoulders to the tail.
I went back to Loft Along Path and this time got it to work. This essentially the same system as ‘gH2Ost’ a tapered central flat section with circular rotated profiles on the edge. The air flow underneath needs more work. The air flow on top is improved and the overall shape is simplified.
With my new found success with LAP I went back to body 1 and rendered all the E 214 profiles.
Body 5. With the body 1 chunk I reversed the trike setup and put the spats at the back. This has the chance of excellent airflow well down the form. I can also reduce the overall width down to +/-600 mm.
The next step was to measure the dimensions of the body I am aiming to transport.
I set up a board as seat back and surrounded myself with boxes for the rib cage/hips, shoulders, back of the head, eye line, leg bent and straight for knee height.
The bent knee height sets the velomobile body height which sets the eye line.
I then drew these up as Chassis Bounded Volume. It is NOT a chassis it is only the volumes and boundaries of a human body cycling lying down.
The light blue plane is the flat foot length.
The top edge of the green plane is the knee height and relative distance.
The dark red plane is the back of the shoulders and head The purple plane is the eye line height and distance of the eyes from the back of the head.
The yellow plane is Eppler 214 scaled to clearance fit at the shoulders at the dark red plane.
I then place a station at the red plane with 16 points where 8 X Eppler 214 profiles would pass for minimum clearance.
There is clearance below the Chassis Bounded Volume for sag in the hammock and the 150 mm (6 inch) ground clearance.
A 26 inch 559 rear wheel and the 20 inch 406 wheels, spats and inboard axle, were placed approximately in the right area.
An Eppler 817 hydrofoil profile was chosen because it is designed to work at low flow speeds and is rear loaded, that is its maximum height is well back on the chord line. This was scaled in the vertical plane, only to give a taut profile line to the nose of the body.
As with the front wheel spats the E214 were then laid on the profile line and then scaled to pass through the station. Whatever shape was generated would be exactly right, but I had no idea what it would look like! I thought the nose profile was irrelevant because the E214’s are stacked with no distortions between levels, aah, well, maybe.
My aim in designing this new velomobile was to make it as simple as possible while reducing the effort to push it through the air. I also wanted to make something with as few compromises as possible.
The major influences at work in this design is the invention of Jurgen Mages and his Python recumbent bicycle geometry. This went completely against the RULES of bicycle steering geometry and created bikes which not only steer and handle but have done so over thousands of miles of commuting and touring. Please see in
One of the biggest sources of drag in a land traveling vehicles are the holes needed to clear the wheel(s) when they steer. Reduce the clearances to a minimum and you are doing as much as you can.
This image shows the plan view of a 20 inch 406 BMX front wheel. The aero profile is Eppler 214 Low Reynolds number which is calculated for low speed air flow. The ellipse is to give enough clearance for tyre punctures while not creating interference drag. The leading edge profile comes from the ellipse.
I could not imagine what this might look like, so I had to generate it to find out. This latest design completely changed my approach. Usually I draw what I want and then work on it until I am happy with the result. This time I set out the rules and see what comes about and worry about making it later.
The wheel does not pivot in the fairing, so pivot the fairing, this creates aero problems with the axle/fairing join. Simplify the whole front end and make the wheels, fairings and axle one piece. This does away with pivots, uprights, steering arms, rose joints and a mass of nuts bolts and washers.
“Nothing weighs less than nothing”
The next step was to put the disk brakes in-board. The axle then only had to deal with bending forces, all torsional braking forces are dealt with in the central structure leading directly into the chassis.
Make the nose of the body one piece with the axle and the messy aero join is avoided. Now bend the body to steer the wheels. So far I have come up with 3 ways in principle to do this.
Recently Cezar Totth from Romania contacted me with this message, and I have included it and the images here, as it is similar to what I am doing.
Hi Ken,
I just started a sketch for a simple and lightweight skin-on-frame velomobile hull.
Not aiming for that gorgeous streamline you made, I’m more into building simplicity and comfort, that means fatter & shorter, open cockpit, with fewer longitudinal tubes.
My current target is a light electric commuter delta trike with pedal assist.
I started a 1/2 scale model frame made of 11mm pvc tubest.
Thanks for your inspiring effort. As I mentioned, I find it gorgeous.
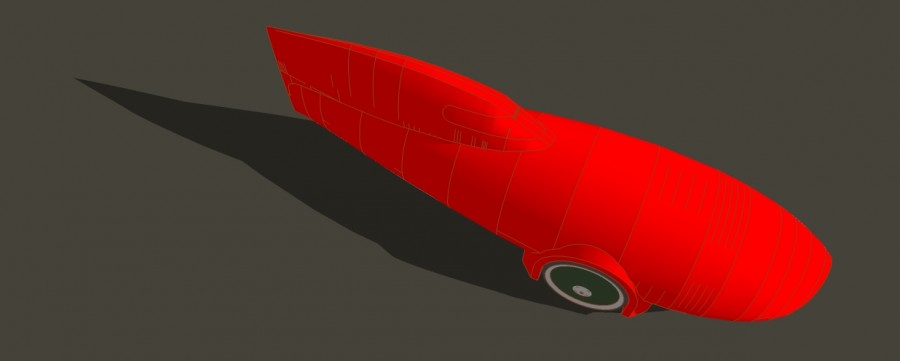
I made a start on a Sketchup 3D drawing to have something to point sticks and throw rocks at. The first task is to cover the rider and front wheels. I wanted to keep a simple shape, and deal seperately with the head above the shoulders to give minimum frontal area. The body frontal area is determined by the height and width of the shoulders, and the height of the knees as they cycle. The wheels cause a lot of turbulence. If you enclose them, then the body has to be wide enough for steering clearance at full lock. If you try to pursue one aspect of a design for purity of function it has a terrible habit of showing up flaws in another area. I don’t like compromise, but trying to find the best balance of the least offensive solutions is often the most you can hope for. I had already been through this with the “Blimp”, so that seemed a good starting point for development.
Building the drawing in two parts and combining them was too much lke hard work and showed up how difficult the real construction could be. So I combined the head faring into the main body, at the cost of increased frontal area.
This looked OK until I put in the clearnce for the feet. This gave two ‘nostrils’ which appeared to be scooping air into the body.
I added an air-dam but this unbalanced the look badly, I tried an elliptical dam guiding the air around the wheels and away again, but again it looked very difficult to build and keep light. The dam would have be able to to rise over Speed Bumps, adding complication, weight and jamming.
In order to divert the air around the feet I lowered nose, and the tail, to smooth the air flow and balance the shape.