In Part 1 of this write up I said the steering geometry is based on the invention of Jurgen Mages and his Python recumbents:-
http://en.openbike.org/wiki/Main_Page
There has been a great deal of discussion and argument about the best steering angles for any size wheel in any application of the bicycle, road racing, track, mountain bike, shopping bike. All have their subtle variations in angles and trail, all to do with where the tyre meets the ground and pivots. Then along comes Jurgen who places the steering head behind the wheel, does not attempt any of the known rules and it works.
What Jurgen discovered was that at a steering head angle of +/- 65 degrees as the steered wheel is turned the frame rises. The weight of the rider pushes back down stabilising the system.
I refer to Python Projects Survey http://www.python-lowracer.de/projects.html where I find the trail figure for a 20 inch wheel is +/- 140 mm and a steering pivot angle of 57.5 – 71 degrees. Now I know this is for two wheeled vehicles and I am designing a three wheeled vehicle but you have to start somewhere.
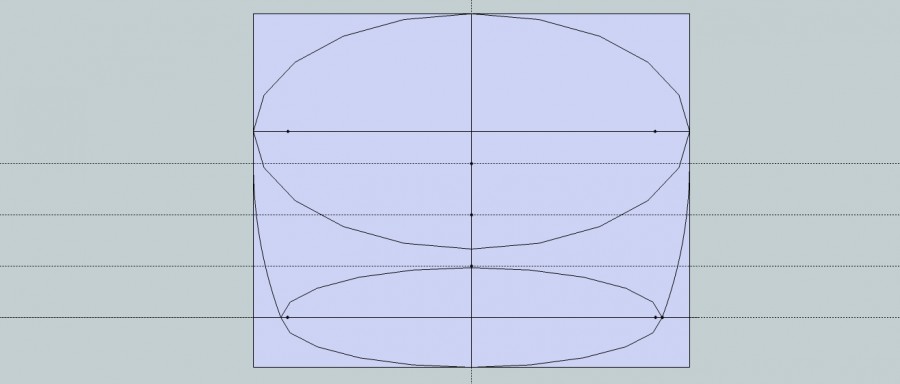
At this point in this project I have developed a simple idea. I have looked at wheel sizes, axles, airflow, body shape by profile stacking, rotation, and extrusion. I have enough toys to play with.

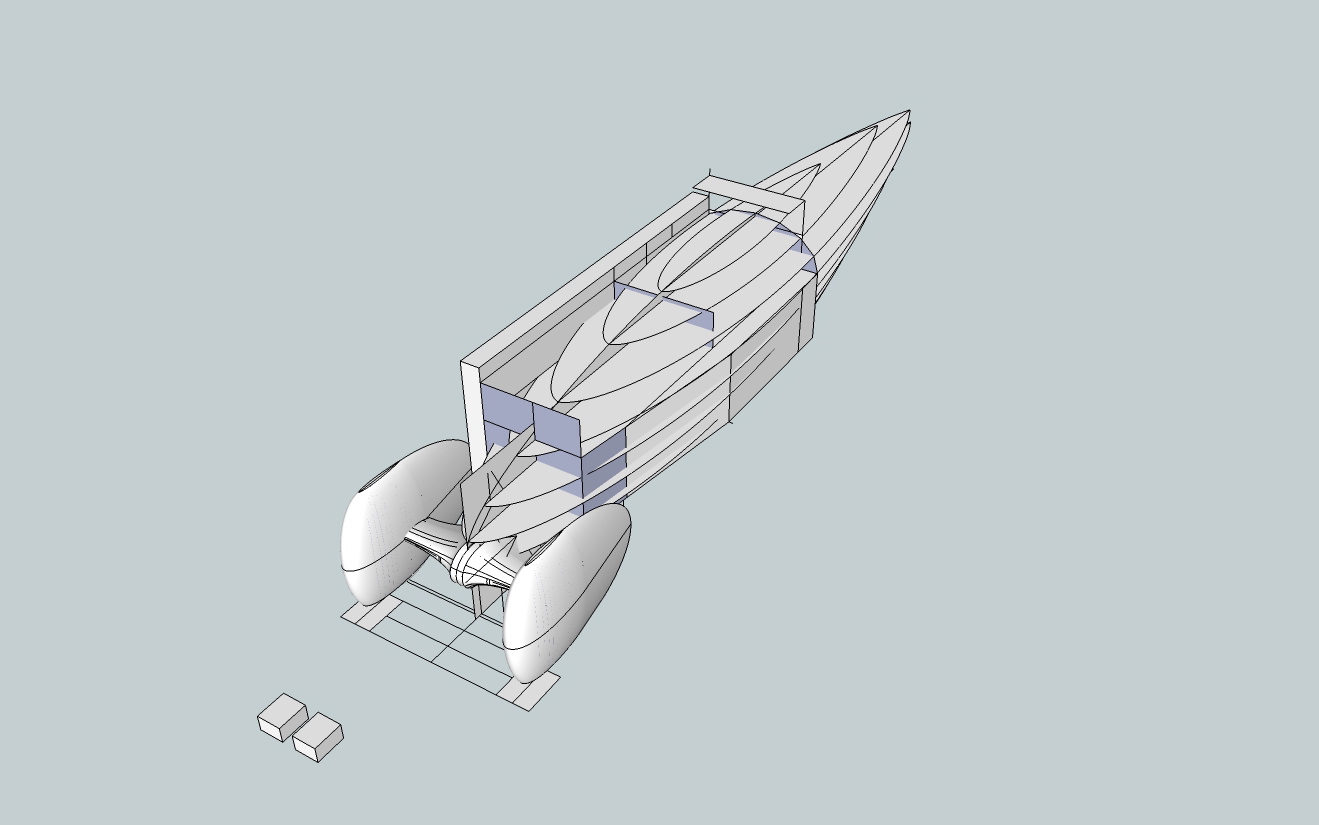
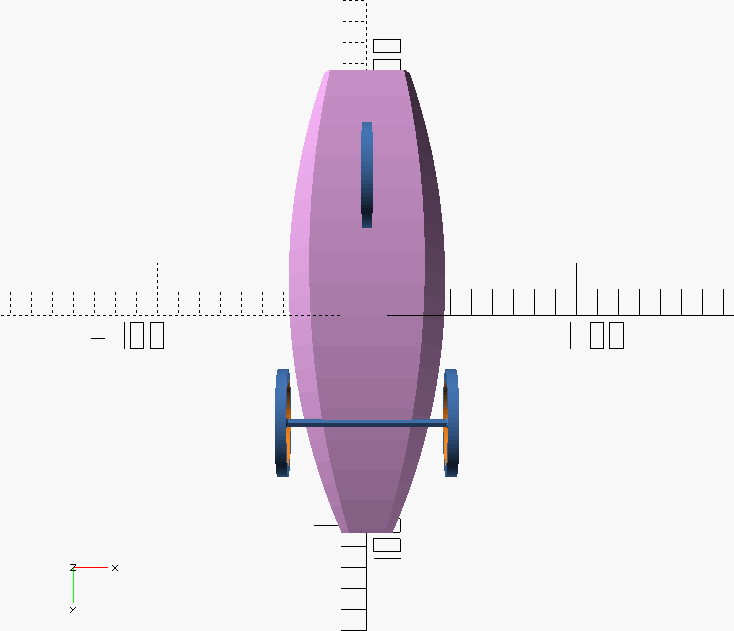
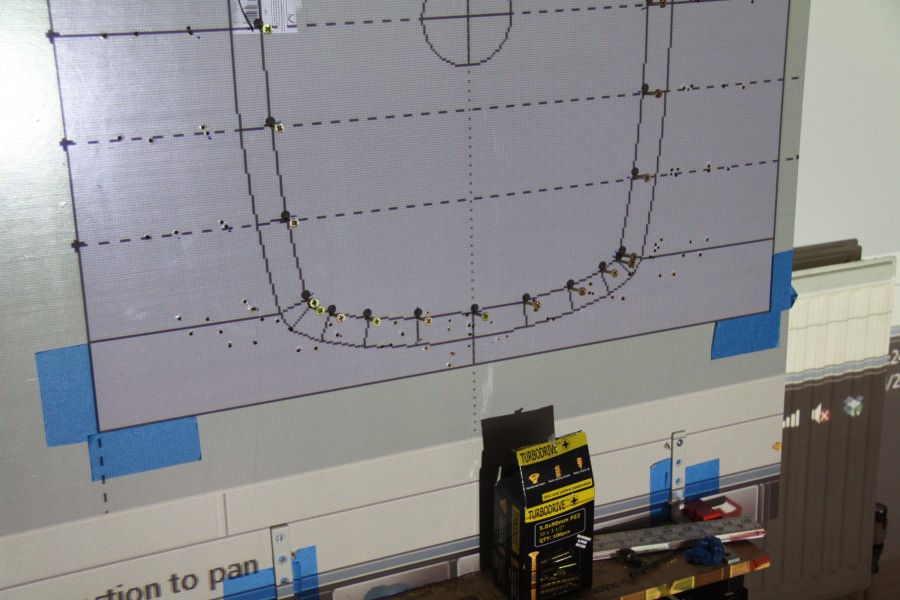
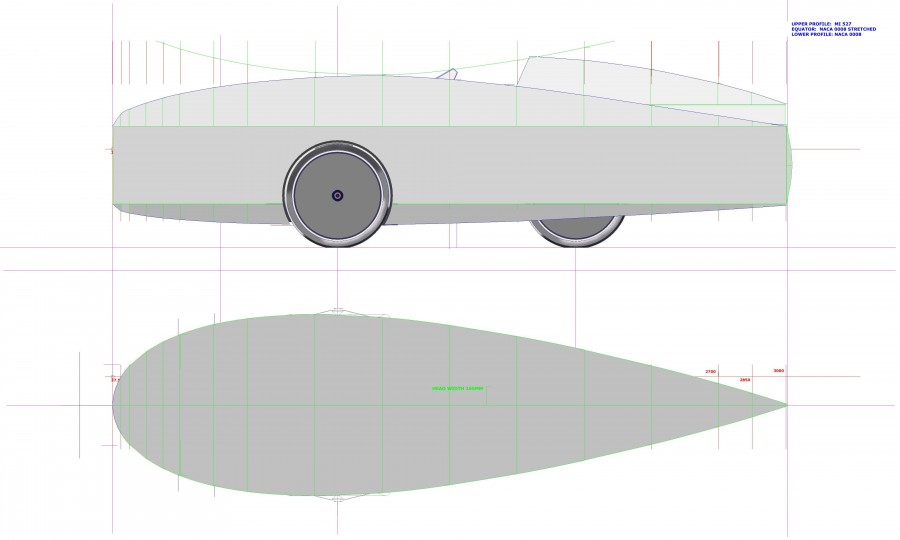
Now is the time to measure the movement in the body structure to give a reasonable turning radius. To do this I use the original Chassis Bounded Volume set up with 20 inch wheels. The file is smaller and takes less generating time. It also allows me to check I am not entering any clearance borders.
Importantly it will also show where a chassis will have to reach to tie it all in to a structure. I take the axle and wheels and add a rotation block with its axis at the point where the 65 degree steering angle meets the ground.

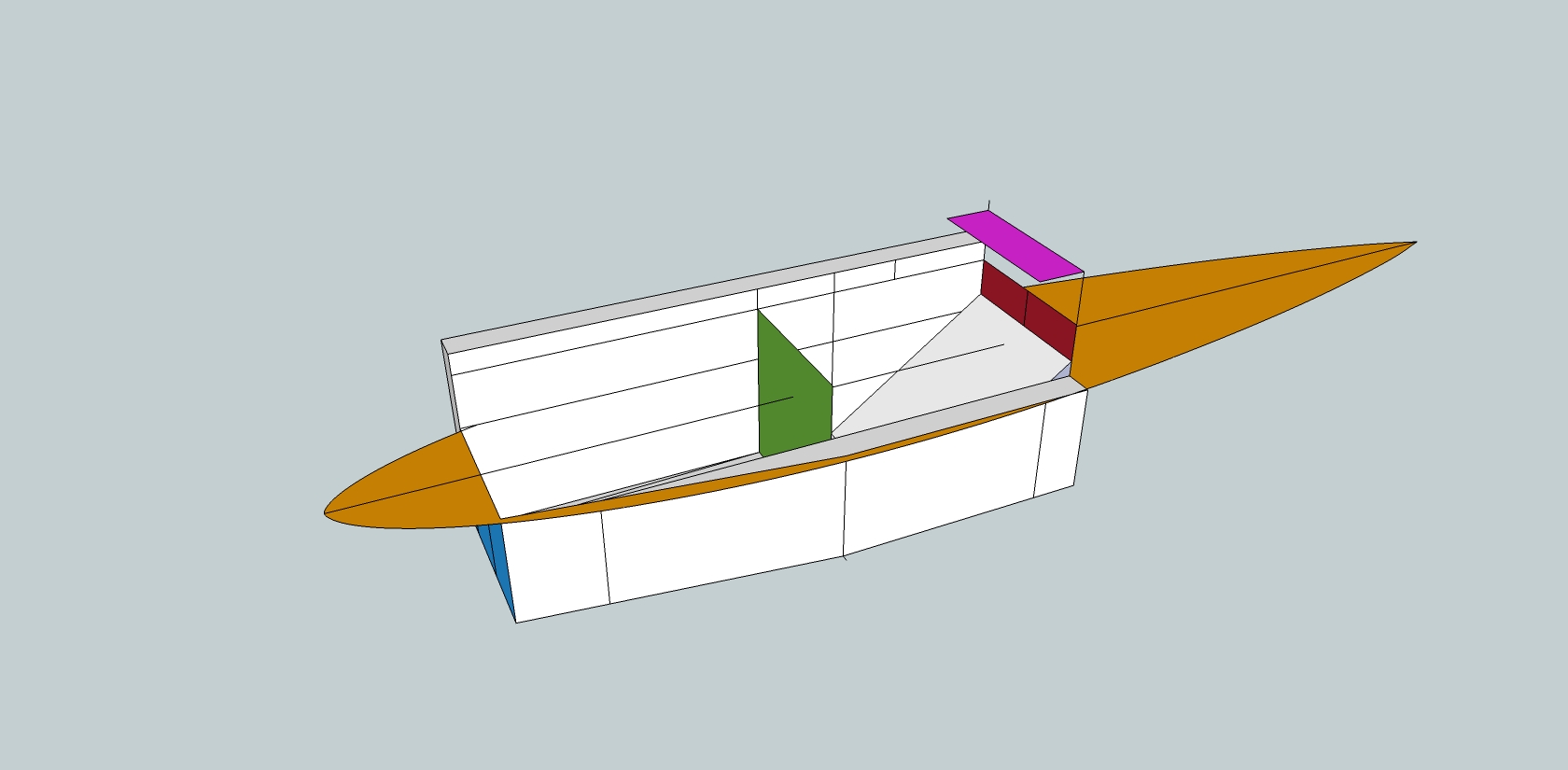
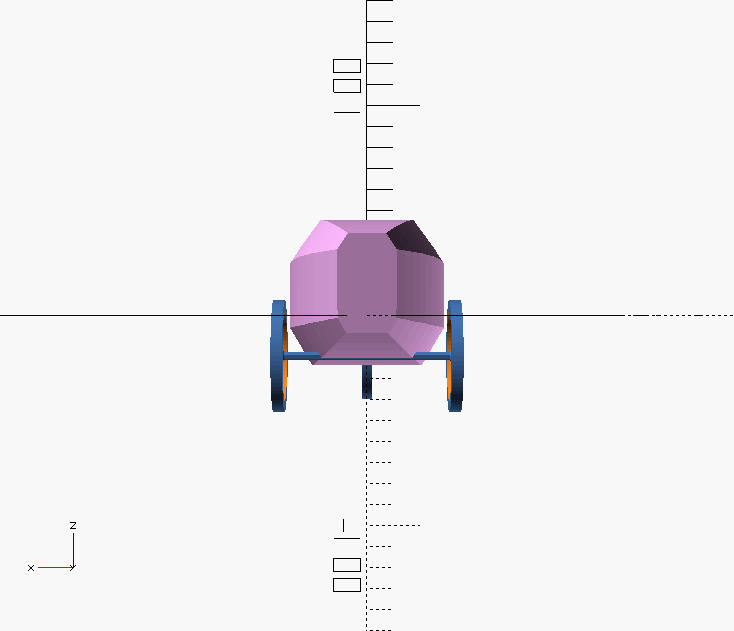
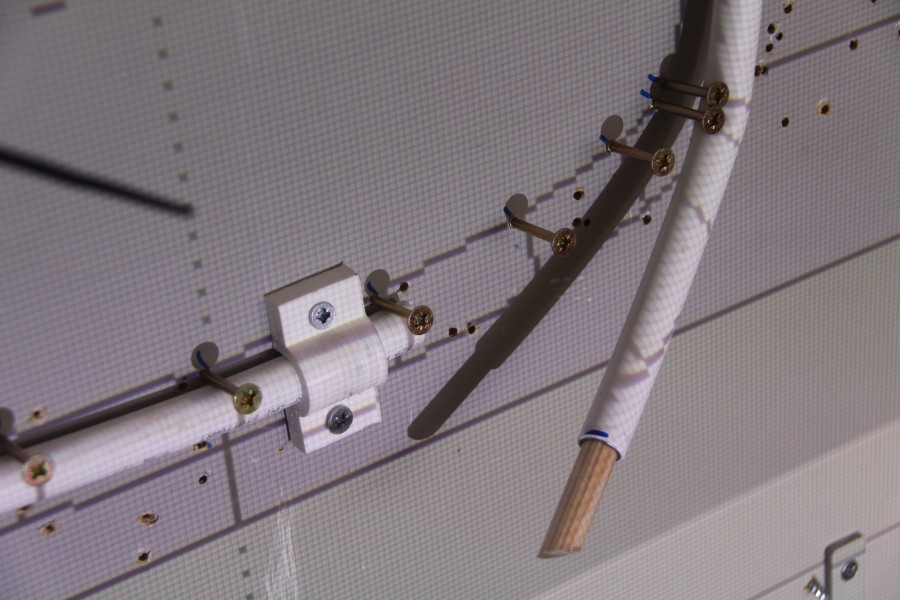
I then place a circle at the origin (the centre of the 3 axiis) and make it a Component. The axle, which is a separate Component is then placed with the trail point at the origin, and tilted forward. Both components are then made a Group. When the Group is tilted back so the axle is level the handling circle is now at 25 or 65 degrees. When the rotation tool is applied the handling circle the axle rotates at 65 degrees to the horizontal. I then position the axle to the correct point on the body and rotate the axle. Axle and body are now combined as a Group. When the Group is rotated to get the axle level the body leans away from the turning direction.

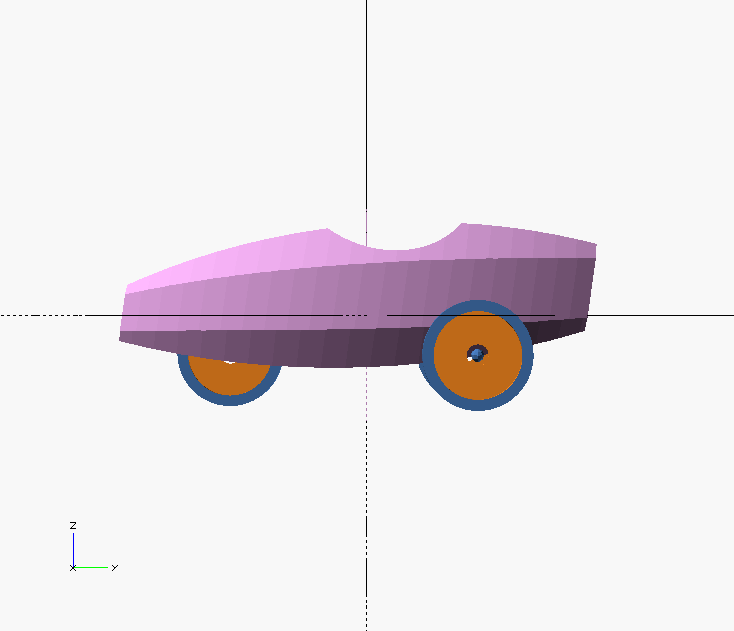
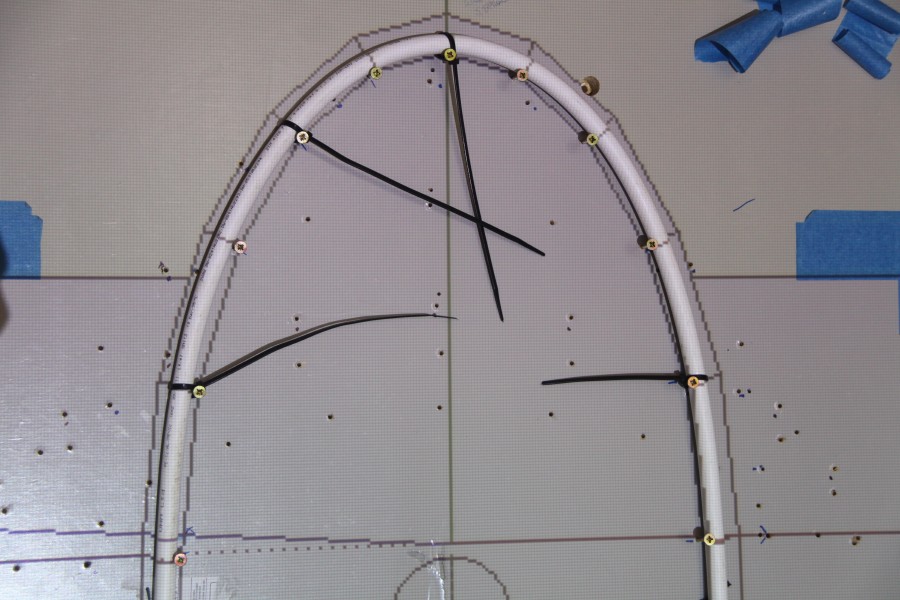
At this point, I reversed the direction of the steering pivot, everything else remains exactly the same. The body now leans into the turning direction. By the findings of Jurgen the geometry is self centering so to pull the body back upright release the steering.
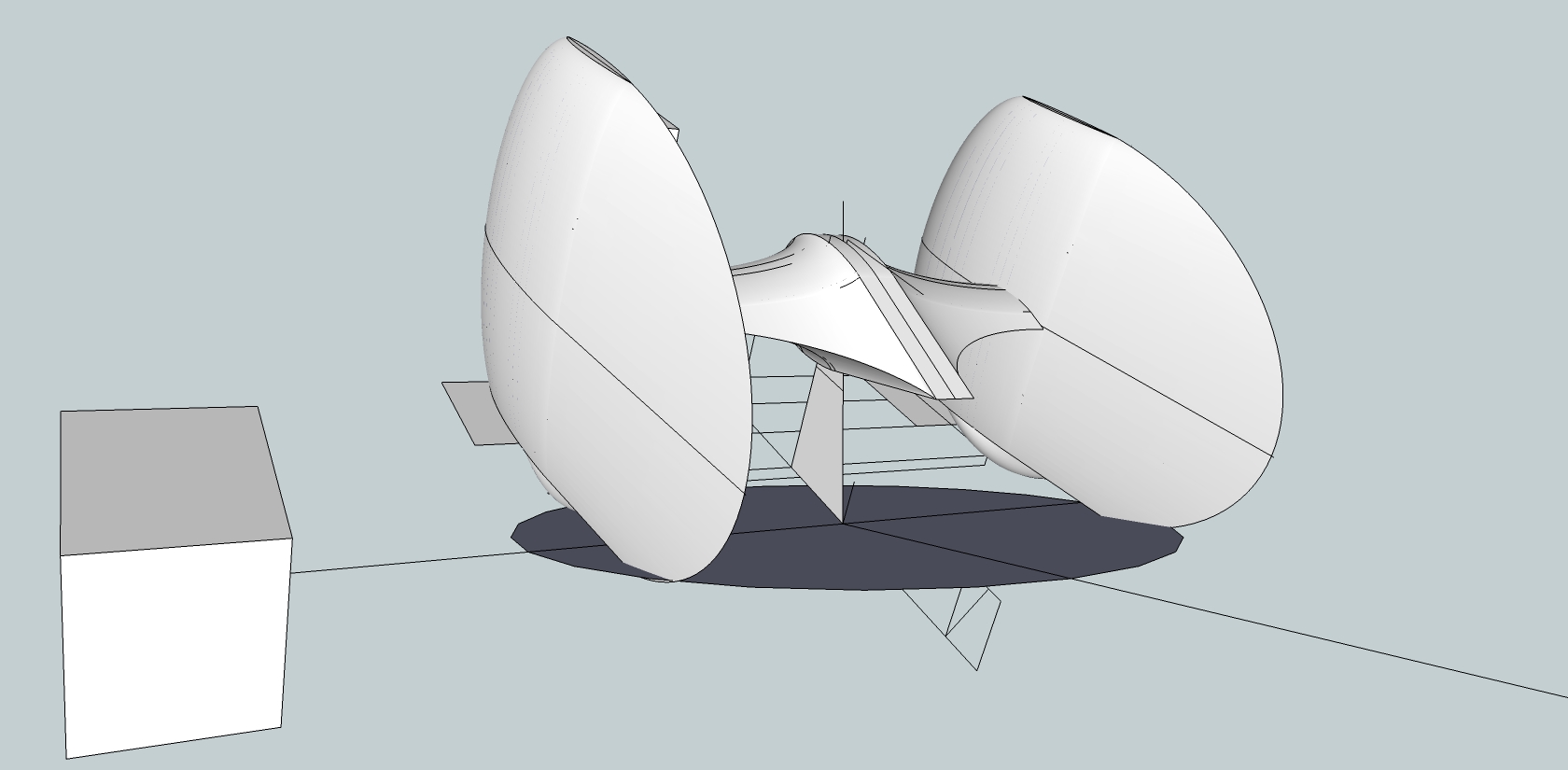

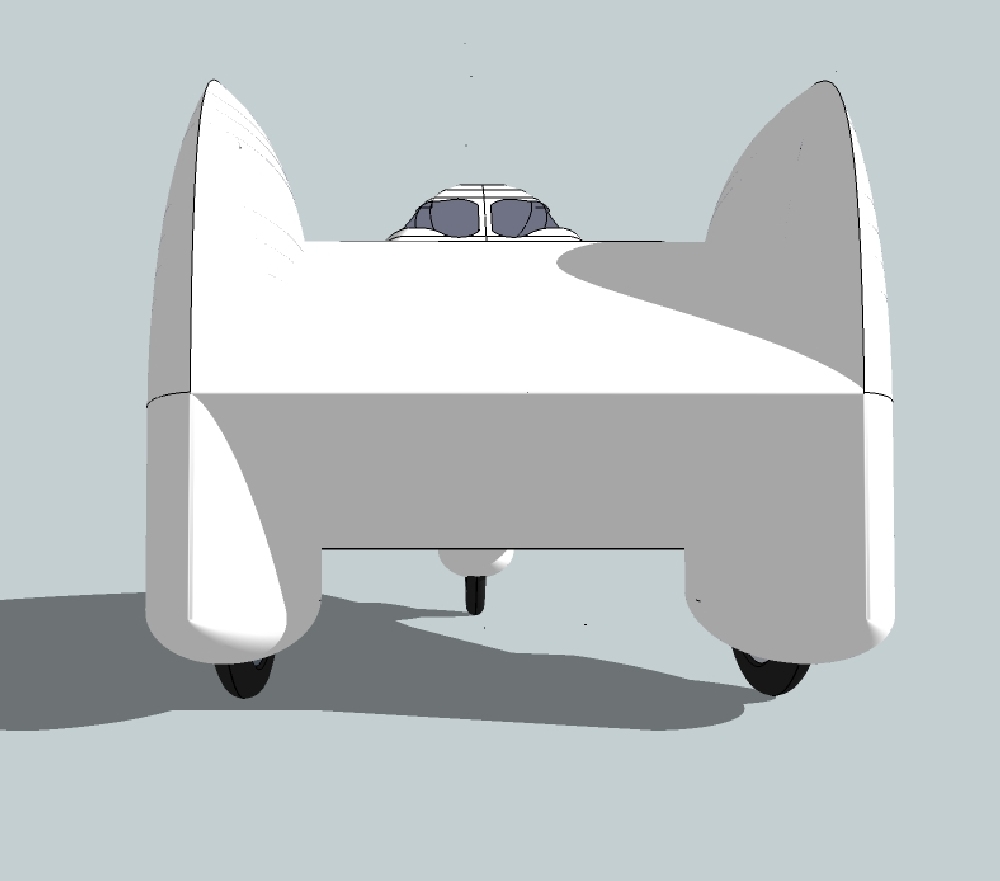
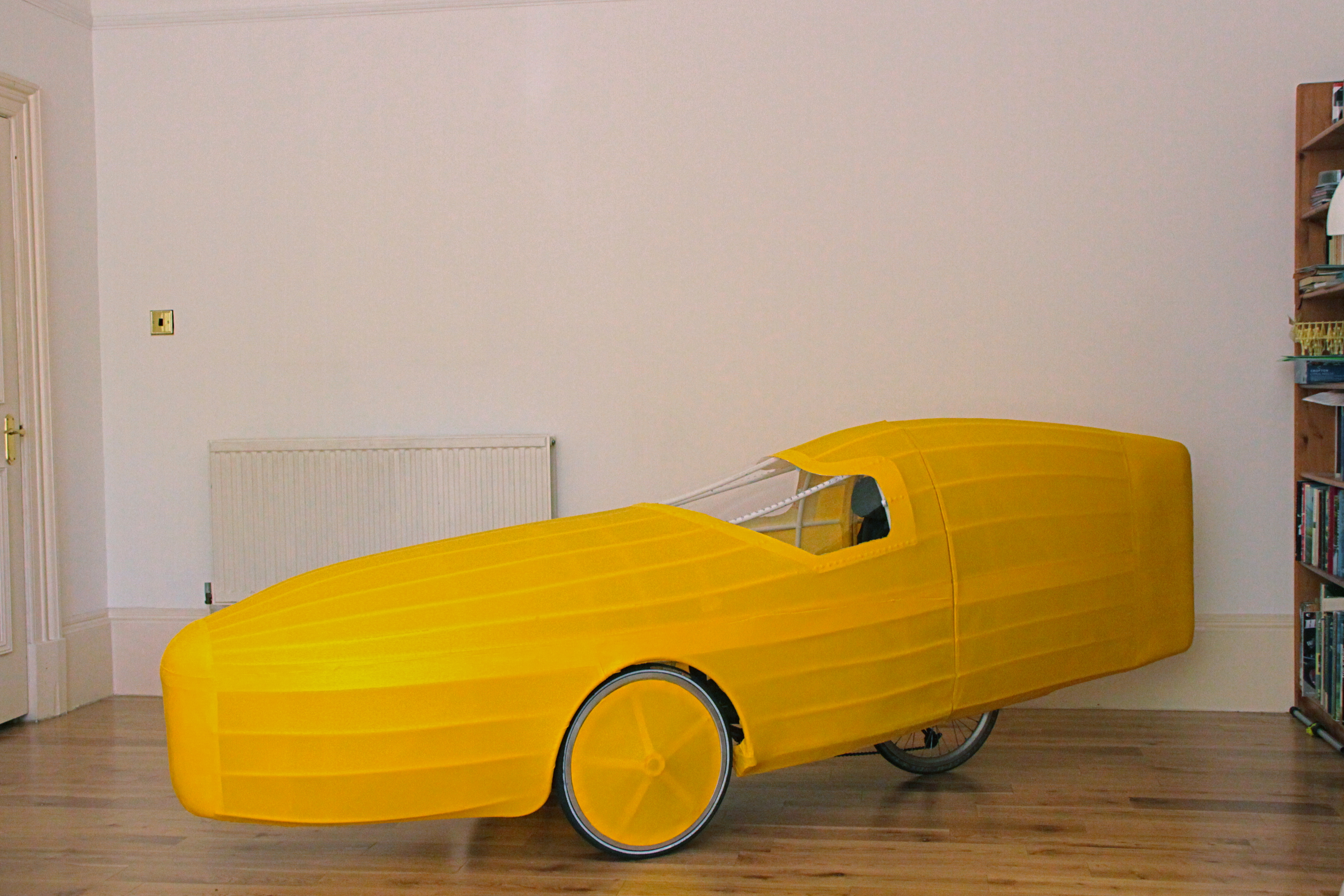
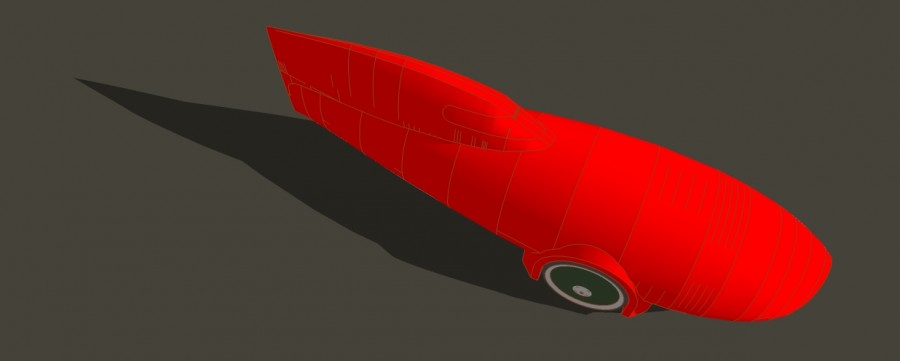
I repeated the process with the rendered body and the 26 inch wheels and straight axle to check for clearance, and this is what you get. I still have to carry on with the development of the one piece axle/nose and body bending design, but this is a good indication the geometry might work.

When I started out to design something I did not ‘see’ before, I did not expect this, but that is why you do it.